
睿揚創新科技

ROBOT


人 型 機 器 人



3軸智慧型機器人
紙機器人
Arduino控制核心,結合摺紙工藝及好玩的機器人科學,讓可愛的機器人以簡單的摺紙就可以完成。機器人組裝完成後,可以與人互動唱歌、七彩顏色發光、左右擺頭……等等,最多可擴充至三個自由度(頭部與雙手)。
機器人紙器(組裝後約22公分)
Arduino控制器
伺服機馬達*3 (頭部及手部)
紅外線感測器
光感測器
蜂鳴器
彩色LED燈
電池盒
8軸智慧型機器人
小藍波
8個自由度機器人機身
以單板電腦BASIC Commander 為控制核心
內含 8-Bit MTP Type MCU
具8-Channel 伺服機驅動電路
配備8個 金屬齒輪伺服機
伺服機扭力30Kg-cm
以BASIC語言編寫操控程式, 符合 CmdBUS 通訊協定架構
具模組擴充能力,附PS2遙控裝置(或選配藍芽通訊模組)
USB介面
附動作編輯軟體, 可自行編程開發
附鎳氫電池、充電器及電源供應器
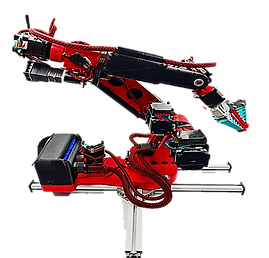
17軸夾爪金剛格鬥機器人(選配視覺鏡頭)
全人形CNC 纖維板材+3D列印PLA 材料機體結構
輕量化且堅固耐用
機器人17個自由度(含腰部、夾爪*2)
以單板電腦BASIC Commander為控制核心
內含8-Bit MTP Type MCU
具16-channel伺服機驅動電路
配備17個金屬齒輪伺服機,伺服機扭力42 Kg-cm,空心杯
伺服機含保護功能,最大工作角度300度
以BASIC語言編寫操控程式, 符合 CmdBUS 通訊協定架構
內含伺服機驅動模組、伺服機
具模組擴充能力
USB傳輸界面
附動作編輯軟體, 可自行編成開發機器人動作
附鎳氫電池、充電器及電源供應器
機 械 手 臂



睿揚類工業六軸機械手臂 (NEW)
機器手臂
機構:主體採用鋁合金結構。
重量及負載:本體重20kg,有效負載重1kg。
馬達: 步進馬達*6,扭矩3〜25Nm,0.18步距角。
電源: 24V/10A電源供應器。
工作範圍:
X軸約為 -313 〜 629mm。
Y軸約為 -629 〜 629mm
Z軸約為 -91 〜 733mm。
運動演算核心:
iMXRT1062,ARM Cortex-M7 32位元處理器,PWM通道*35、類比IO*18、UART通訊介面*8、數位IO*32、SPI通訊介面*1、I2C通訊介面*3及支援Arduino C語言韌體編寫。
模組控制核心:
ATmega 328P 8位元處理器,PWM通道*6、類比IO*8、數位IO*14、UART通訊介面*1、SPI通訊介面*1、I2C通訊介面*1及採用Arduino C語言韌體編寫。
*範例影片:(影片)
※如您有需要請聯絡我們
6軸XYZ Robot (缺貨)
機器手臂
6軸機械手臂 ( 進階版 )
3D列印機身 ( W18 x D24 x L36.5 cm ) 重量755g
Arduino控制核心, 金屬齒輪AI-16伺服器x6
轉動幅度可達360度, 藍芽通訊模組, 可手機APP操控
※如您有需要請聯絡我們
6軸XYZ Robot (缺貨)
機器手臂
6軸機械手臂 ( 進階版 )
3D列印機身 ( W18 x D24 x L36.5 cm ) 重量755g
Arduino控制核心, 金屬齒輪AI-16伺服器x6
轉動幅度可達360度, 藍芽通訊模組, 可手機APP操控
※如您有需要請聯絡我們
4軸DoBOT2.0 (缺貨)
桌上型機器手臂
標準版:鋁合金6061機體
底座尺寸:15.8 x 15.8 cm
重量:4kg
Arduino 控制核心, 步進馬達 x 3, 藍芽通訊模組
夾具部分可隨用途更換
可用功能:書寫、焊接、移動、抓握東西、3D列印
進階教育版:雷射雕刻、Wi-Fi模塊、I操縱桿、手勢感應器
※如您有需要請聯絡我們
輪 型 機 器 人




.png)
彩虹創客自駕車 (NEW)
Rainbow Car (NEW)
科技寶組合積木車體,採用Arduino控制板核心,支援Arduino Open Source資源。
車體本身配備多種感測器,可以運用程式設計成循跡及避障自走車,升級搭載6組紅外線循跡感測器提升精準度及六軸陀螺儀調整車體移動速度,同時支援圖控Blockly及Coding編程軟體,搭配手機App成為行動控制自走車。
適合學校課程、研習、競賽及招生活動
AI 無人自走車
金屬車底盤,車體大小約19.5cm*23.5cm*23.5cm
具備兩輪轉向機構、兩輪驅動
使用 Jetson Nano 與 Arduino 雙控制核心
配備智慧視覺辨識鏡頭*2 (720P/160度廣角、120度廣角),支援60fps,支援多平台
配備直流馬達x2,轉向伺服機x1
配備九軸感應器、輔助照明燈
配備11.1V(3cell)/ 2000mAh(含以上)鋰電池
配載 ROS 系統結合視覺辨識模組,搭配學習課程及範例程式
提供Windows系統可使用的網頁介面,實時監控實驗器影像畫面
適合應用於影像分類、物件偵測、分割和語音處理
提供簡易實驗器參數調整介面
適合學生課程、競賽及研習使用
輕量級相撲車
可重組式塑鋼車體結構,長*寬*高24cm*26cm*14cm,重量1.9公斤±10%
主控板相容 Arduiono UNO控制板
配備馬達驅動模組可以輸出最大3A電流直接驅動馬達
配備紅外線感測器*4
使用18650電池*2及充電器
提供範例程式
收納盒
��重量級相撲機器人
鋁合金車體結構,長*寬*高29.5cm*22cm*13.5cm,重量約4.2公斤
主控板採用利基Ozone Arduino控制板,完全相容Arduiono Leonardo板。
內建cmdBus介面,可完全操控利基cmdBus模組。
配備馬達驅動模組可以輸出最大5A電流直接驅動馬達。
配備二個DC 12V直流馬達,減速比1/14,扭力6.5kg-cm。
鋁合金輪胎4顆,直徑8CM,矽膠胎皮。
11.1V 2250mAh 35C鋰聚電池及充電器。
紅外線感測器*6。
附範例程式。
小阿丟車
Mini Ardu Car
Arduino Nano控制核心, 配備減速馬達(3~6V.1:48)
紅外線循跡感測器、馬達驅動IC、按鈕開關x3、發光二極體(LED)、
RGB彩色LED模組、蜂鳴器、橡膠輪組x2、旋鈕式開關、CDS光線感測器x2
超音波模組、藍芽模組等
適合學生專題、競賽及研習營隊使用
線迷宮循跡自走車 (缺貨)
BC-BOT
BC單板電腦核心, 內含8位元單晶片
另有搭配32位元微控制器作為底層協同控制器
VB語法程式控制
配備直流馬達、紅外線循跡感測器、2x8液晶顯示器、LED、蜂鳴器等
適合線迷宮電腦鼠競賽
另外可加裝導航板(NAVIBoard), 增加學習導航功能
可參與機器人自主導航避障競賽
※如果您有需要請聯絡我們
線迷宮循跡自走車 (缺貨)
OZBOT
OZONE控制板, ATmega32u4控制核心, 內含8位元單晶片
完全相容Arduino Leonardo板
另有搭配32位元微控制器作為底層協同控制器
Arduino語法程式控制
配備直流馬達、紅外線循跡感測器、2x8液晶顯示器、LED、蜂鳴器等
適合線迷宮電腦鼠競賽
另外可加裝導航板(NAVIBoard), 增加學習導航功能
可參與機器人自主導航避障競賽
※如果您有需要請聯絡我們


教 具 模 組 箱



